I competed in HackTech 2025, a hackathon organized and hosted by Caltech for
undergraduates around the world. At the hackathon, I met Ohm Rajpal, Arnab Ghosh, and Vickie Knight, and we collaborated to create
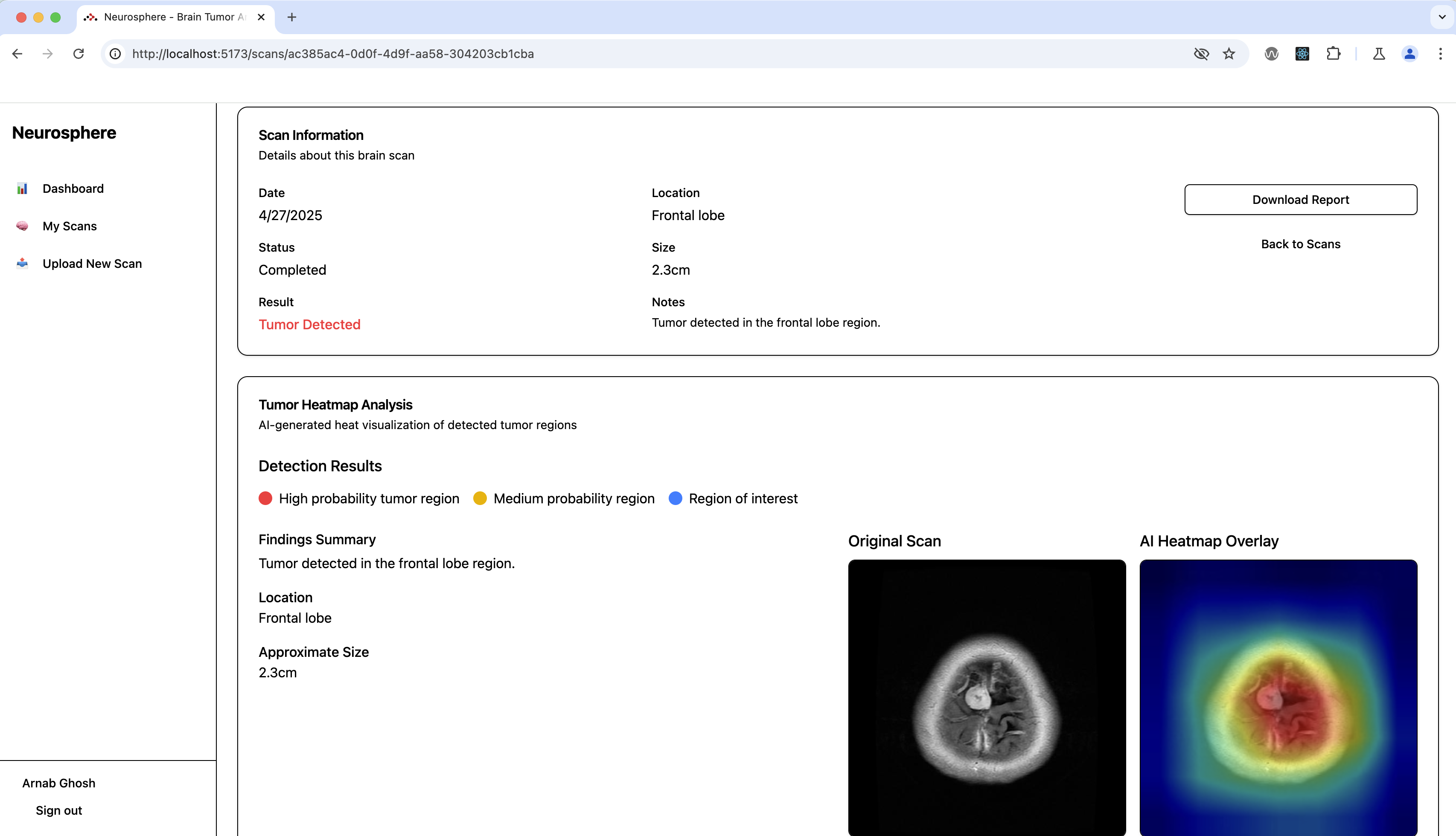
Neurosphere, a web application that locates and classifies brain tumors from
uploaded MRI scans. It also enhances visualization of the brain, enabling doctors to
have a readily accessible map of a tumor's location.
Since I had experience with machine learning, I was responsible for tumor location
and classification. I found a dataset on Kaggle with MRI images of brain tumors with
labels for tumor type. I used PyTorch to load the pre-trained ResNet CNN model and
fine-tune it on the dataset for tumor classification. After achieving 98% test
accuracy, I researched methods to locate the detected tumors for improved
functionality. I discovered the Grad-CAM method, which uses activation outputs in
the neural network to report the most relevant layers. In a CNN, this corresponds to
regions in the image where the relevant features are most likely. This enabled our
app to highlight regions in the MRI scan where the tumor is most likely located. I
implemented this algorithm in our application, representing the output with a
heatmap through Matplotlib, and it made a valuable addition to our app. I also used
the center and spread of the Grad-CAM distribution to determine the brain lobe
containing the tumor and approximate the tumor's size respectively.
My teammates worked on other aspects of the website, including the frontend, backend,
database, and the brain visualizer. We seamlessly integrated the model that I had
trained, and the result was a fully functional app. We submitted our project to the
health track of HackTech 2025, and we won the "Best Use of MongoDB" award. In
addition, we were specially chosen for an interview with representatives from Major
League Hacking to demonstrate our project for social media.